
MARPA on small radars, is Navico 4G especially bad?

Warning (2018): This entry was written in 2015 and since then Navico has improved MARPA in the 3G and 4G radars sold by Simrad, B&G, and Lowrance. (We're proud that even old Panbo entries appear high in Google searches, but that can lead to misimpressions.)
Does Navico 4G radar (branded as Simrad, Lowrance, or B&G) have a "ridiculously broken MARPA" function? I've heard similar words from three different 4G owners in the last few weeks, and that's enough to interrupt the boat show and summer testing entries I'm way behind on. I don't have a definitive answer, however, plus I'm skeptical that Navico's MARPA is especially bad because in my experience all small radar Mini Automatic Radar Plotting Aids are somewhat flaky for what seem like fairly obvious reasons...
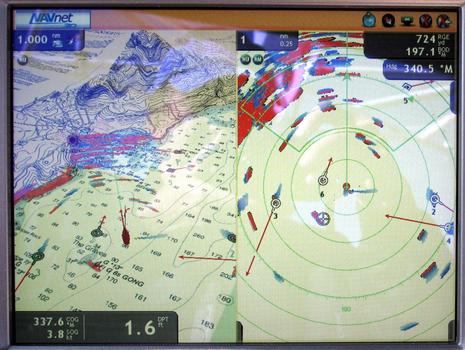
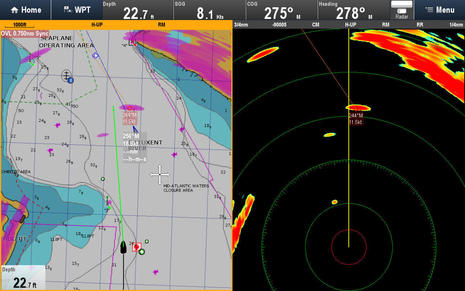 Let's start with an example I screen captured on Chesapeake Bay last May. The AIS and MARPA targets seen overlaid on the left side mark the same boat blowing by Gizmo in broad daylight. The reason the AIS target is lagging behind the radar target is a known issue with Class B transponders; they only transmit dynamic data every 30 seconds at best, while the radar blip is refreshing every 2.5 to 1.2 seconds (depending on the array's possible 24 to 48 revolutions per minute). Very soon after this shot, the AIS target jumped to where the radar blip was as the boat steadily planed up the bay. However, the AIS reporting of 256° heading and 18.9kn speed are quite accurate, as they're coming directly from a GPS on the target boat. Meanwhile, the 12° degree and 7.4 knot errors in the MARPA calculation are actually pretty darn good in my experience.
Let's start with an example I screen captured on Chesapeake Bay last May. The AIS and MARPA targets seen overlaid on the left side mark the same boat blowing by Gizmo in broad daylight. The reason the AIS target is lagging behind the radar target is a known issue with Class B transponders; they only transmit dynamic data every 30 seconds at best, while the radar blip is refreshing every 2.5 to 1.2 seconds (depending on the array's possible 24 to 48 revolutions per minute). Very soon after this shot, the AIS target jumped to where the radar blip was as the boat steadily planed up the bay. However, the AIS reporting of 256° heading and 18.9kn speed are quite accurate, as they're coming directly from a GPS on the target boat. Meanwhile, the 12° degree and 7.4 knot errors in the MARPA calculation are actually pretty darn good in my experience.
READERS BEWARE (added 12/6/15): It would be hard to untangle the text below, but it is to some extent based on a significantly wrong assumption. Radar bearing accuracy is independent of horizontal resolution, and isn't particularly related to beam width. So the phenomenon of seeing two targets as one is true, but it does not have a direct effect on MARPA calculations. I learned this in the Panbo comments below, slowly and largely thanks to Peter Hayden's tenacity. However, you'll also see that I'm not the only one who's often seen uncertain MARPA calculations from small radars. Why that is -- and how much it varies from brand to brand (or in some cases, boat to boat) -- is still in discussion. Mea culpa, Ben
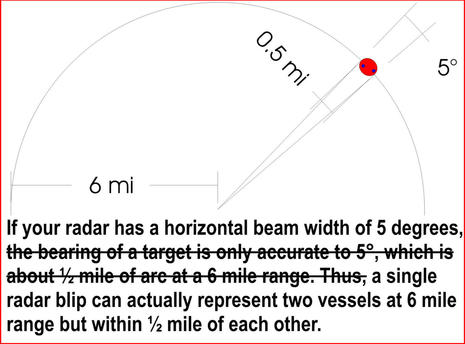
MARPA calculations are really hard! The MFD involved has to compare the range and bearing of successive target returns to calculate its relative speed and heading, and then subtract out your own boat's motion. But radars, especially small ones, are quite imprecise at range and bearing. That's why pulse power and horizontal beam width are primary specifications always listed for radar units and always discussed in radar courses. The 5 degree beam width, typical of 18-20 inch radomes like the Simrad 4G and the Raymarine RD418HD behind the MARPA example screens above, means that the raw microwave pulses cannot discriminate detail within a 5° swath, and that swath really is a half mile wide at a 6 mile range. In other words, the individual target bearings used in MARPA calculations are quite crude.
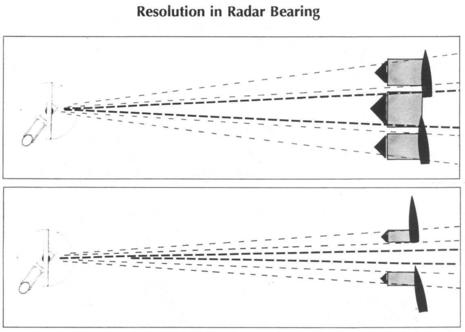 Fifteen years ago I used the Ocean Navigator School of Seamanship illustration above to teach how large radar beam widths can even make two targets look like one, and I probably first came across the concept in Chapman's or something similar in the early 70's. The uncertainty of radar vision is in my boating bones, and hence I've never been surprised to see MARPA true heading and speed calculations jump all over the place, at least until the MFD has had a good long time to compare successive bearing and range guesstimates. By the way, the 5° beam width applied to the Raymarine 3/4 mile MARPA target above -- online calculator here -- indicates that the radar was trying get precise bearings on the fast 40-foot boat with a beam 400 feet wide. No wonder it got the speed so wrong, and no wonder that I've rarely seen small radar MARPA calculate the speed of a fixed navigation aid at 0 knots (though I've tried that trick with many radomes).
Fifteen years ago I used the Ocean Navigator School of Seamanship illustration above to teach how large radar beam widths can even make two targets look like one, and I probably first came across the concept in Chapman's or something similar in the early 70's. The uncertainty of radar vision is in my boating bones, and hence I've never been surprised to see MARPA true heading and speed calculations jump all over the place, at least until the MFD has had a good long time to compare successive bearing and range guesstimates. By the way, the 5° beam width applied to the Raymarine 3/4 mile MARPA target above -- online calculator here -- indicates that the radar was trying get precise bearings on the fast 40-foot boat with a beam 400 feet wide. No wonder it got the speed so wrong, and no wonder that I've rarely seen small radar MARPA calculate the speed of a fixed navigation aid at 0 knots (though I've tried that trick with many radomes).
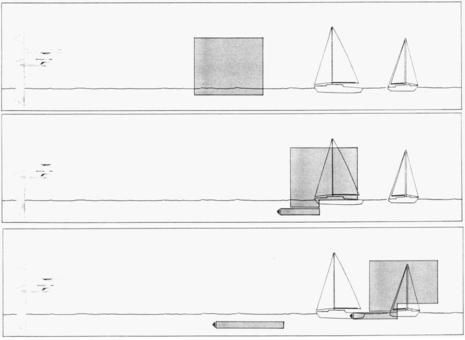 Radar range resolution is also an issue. While the old illustration above shows how a relatively short pulse can discriminate between two targets with a similar bearing, you can imagine how the companion diagram has a long pulse returning the targets as one solid blip. But small radars with relatively low 2-4 kW power need to use long pulses to put enough energy on target to get any return at all. The resulting range uncertainty is much harder to quantify than beam width because different radars use different pulse lengths at different ranges, but, sorry, range is not truly precise even if MARPA data windows make it seem so.
Radar range resolution is also an issue. While the old illustration above shows how a relatively short pulse can discriminate between two targets with a similar bearing, you can imagine how the companion diagram has a long pulse returning the targets as one solid blip. But small radars with relatively low 2-4 kW power need to use long pulses to put enough energy on target to get any return at all. The resulting range uncertainty is much harder to quantify than beam width because different radars use different pulse lengths at different ranges, but, sorry, range is not truly precise even if MARPA data windows make it seem so.
All this is why I wonder about the recent email that says in part, "I've searched your site for any reference to Simrad's MARPA problem but haven't found anything...The problem is MARPA is unstable, it often fails to display any data, or the data it does display is erroneous and doesn't match AIS data. This isn't a new problem, I've logged a call with their tech support but no fix has been made to my knowledge...Apparently Navico is too big to care." Could it be that this 4G owner has unrealistic expectations of what small radar MARPA can do? Or maybe "the Simrad MARPA problem" really is a particular thing? Hopefully this entry will draw comments from all sorts of MARPA users, especially ones with 4G experience, and maybe from Simrad itself. (Afterall, compared to Garmin, Furuno and Raymarine/Flir, Navico is actually the smallest of the major electronics companies, I think, and surely the one with the most eggs in recreational marine.)
 But how many boaters actually use the MARPA they may have? I'm obviously not a big fan myself, and when I searched Panbo for past references it turned out that I used the only MARPA titled entry mostly to discuss attractive alternatives like the True Echo Trail feature seen above emanating from a Furuno DRS2D radome. That little radar can even do full-on ARPA, the automatic radar tracking that's usually only available on ships, but note that Furuno has removed many such advanced features from the similar DRS4W WiFi radome and even the new no-separate-power-supply DRS4DL. While the prices for these radars is much lower and the user interface much simpler, a Furuno rep at FLIBS also told me that not many recreational boaters use MARPA, ARPA, True Trails, True Motion, high RPM, and similar features, anyway. You could say they're lazy, but I think that most modern radomes offer a lot of useful information without the extra features, especially combined with AIS and chart overlay. When a yachtsman says that MARPA is critical to safe navigation, I tend to wonder if they've been overly influenced by the commercial world where radar beam widths are much narrower and pulses much shorter.
But how many boaters actually use the MARPA they may have? I'm obviously not a big fan myself, and when I searched Panbo for past references it turned out that I used the only MARPA titled entry mostly to discuss attractive alternatives like the True Echo Trail feature seen above emanating from a Furuno DRS2D radome. That little radar can even do full-on ARPA, the automatic radar tracking that's usually only available on ships, but note that Furuno has removed many such advanced features from the similar DRS4W WiFi radome and even the new no-separate-power-supply DRS4DL. While the prices for these radars is much lower and the user interface much simpler, a Furuno rep at FLIBS also told me that not many recreational boaters use MARPA, ARPA, True Trails, True Motion, high RPM, and similar features, anyway. You could say they're lazy, but I think that most modern radomes offer a lot of useful information without the extra features, especially combined with AIS and chart overlay. When a yachtsman says that MARPA is critical to safe navigation, I tend to wonder if they've been overly influenced by the commercial world where radar beam widths are much narrower and pulses much shorter.
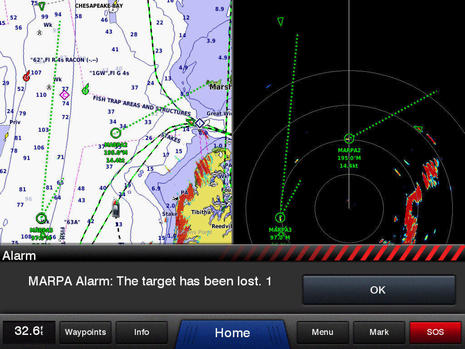 In light of this 4G controversy, I do wish I'd tested MARPA more, but I did find some examples when I flipped through the hundreds of screen shots I've collected in recent years. Above, for instance, is Garmin MARPA working with a GMR 24 xHD radome that I'd just installed in Baltimore last fall. It's the best performing Garmin radome I've tried so far, though often not quite up to what I see on the smaller but similarly priced radomes currently on Gizmo. The Marpa calculations were fairly close to what the targets were actually doing -- the 24 does have a 3.7° beam width -- but I took the shot to remind myself that Garmin also has a lost MARPA target alarm you can't turn off even though almost all such targets go off screen eventually. Raymarine has already heard it directly about their annoying audible alarm, but please, manufacturers, let us users have some say in this. I'd like to reduce MARPA alarms to a simple blinking icon like lost AIS targets, and I think I'd be just as safe.
In light of this 4G controversy, I do wish I'd tested MARPA more, but I did find some examples when I flipped through the hundreds of screen shots I've collected in recent years. Above, for instance, is Garmin MARPA working with a GMR 24 xHD radome that I'd just installed in Baltimore last fall. It's the best performing Garmin radome I've tried so far, though often not quite up to what I see on the smaller but similarly priced radomes currently on Gizmo. The Marpa calculations were fairly close to what the targets were actually doing -- the 24 does have a 3.7° beam width -- but I took the shot to remind myself that Garmin also has a lost MARPA target alarm you can't turn off even though almost all such targets go off screen eventually. Raymarine has already heard it directly about their annoying audible alarm, but please, manufacturers, let us users have some say in this. I'd like to reduce MARPA alarms to a simple blinking icon like lost AIS targets, and I think I'd be just as safe.
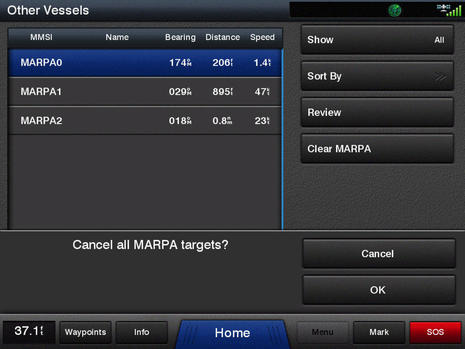 I took this shot to show that Garmin does make it fairly easy to cancel all MARPA targets at once and avoid the alarms, but also to remember that target doing 47 knots while only 800 feet away. If it were close to true I probably wouldn't have been messing with screen captures. Again, I don't recall ever seeing small radar MARPA calculations that didn't get screwy at least occasionally. And the developers can't just smooth out the results so they look more stable than the underlying range/bearing data. A real change in target heading and/or speed is what you're hoping MARPA can tell you quickly. Besides, erratic MARPA are meaningful; the MFD is saying something like "I'm trying to figure this out, boss, but it's hard!"
I took this shot to show that Garmin does make it fairly easy to cancel all MARPA targets at once and avoid the alarms, but also to remember that target doing 47 knots while only 800 feet away. If it were close to true I probably wouldn't have been messing with screen captures. Again, I don't recall ever seeing small radar MARPA calculations that didn't get screwy at least occasionally. And the developers can't just smooth out the results so they look more stable than the underlying range/bearing data. A real change in target heading and/or speed is what you're hoping MARPA can tell you quickly. Besides, erratic MARPA are meaningful; the MFD is saying something like "I'm trying to figure this out, boss, but it's hard!"
 Finally, there's another aspect of the 4G MARPA problem that I feel obliged to bring up. All three 4G owners who complained about it -- one is on the Forum -- referenced the Adventures of Tanglewood blog where Nordhavn owner Peter Hayden has put a lot of time and energy into documenting his bad experience with Simrad gear, MARPA in particular. He eventually tore it all off! I think that Peter may have gotten a little carried away. "The very unhappy customer" is a phenomonon fairly common in marine electronics -- perhaps the dark side of how much fun it is for certain smart, accomplished men to dive deep into their boat gear -- and I've been there myself. It's really hard sometimes to see the forest for that one FUBAR tree.
Finally, there's another aspect of the 4G MARPA problem that I feel obliged to bring up. All three 4G owners who complained about it -- one is on the Forum -- referenced the Adventures of Tanglewood blog where Nordhavn owner Peter Hayden has put a lot of time and energy into documenting his bad experience with Simrad gear, MARPA in particular. He eventually tore it all off! I think that Peter may have gotten a little carried away. "The very unhappy customer" is a phenomonon fairly common in marine electronics -- perhaps the dark side of how much fun it is for certain smart, accomplished men to dive deep into their boat gear -- and I've been there myself. It's really hard sometimes to see the forest for that one FUBAR tree.
At any rate, I think I've read most of Peter's Wall of Shame and while our overall (Simrad) systems were quite different -- they all are -- he had specific issues that don't jibe at all with my specific experience. I also tried to straighten out some misinformation in his NMEA rant and you can see for yourself in the comments that it was hard going, with no correction to the entry made. Which is not to say that there isn't a lot of valuable experience laid out on the Tanglewood blog -- agreed, for instance, that N2K certification is NOT a compatibility guarantee. But I need more evidence before thinking of Navico 4G MARPA as "ridiculously broken" and I'm hoping readers will weigh in.
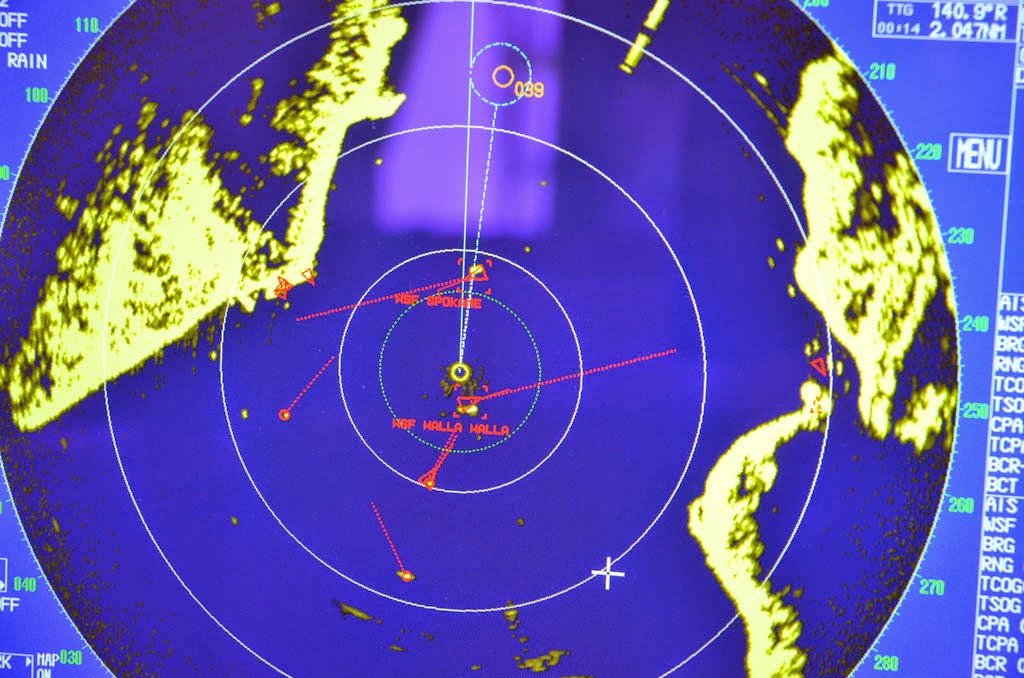
I'll also get another chance to check out 4G and Halo MARPA when Navico again hosts demos in the Florida Keys. Halo MARPA was first shown during the Baltimore NMEA demos, though only briefly. Looking at my photo below, I like the bread crumb trail, which should be solid information about the target's past course and pace, and I don't miss the target vector (an option?). Let's talk about MARPA and other ways you use radar to avoid surprises.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
I'm the ranting madman from Adventures of Tanglewood.
Just so I'm not totally dismissed, I'll offer up that I'm certified for radar operation/watch on any commercial ship, of any size, anywhere in the world. I also have multiple engineering degrees, hold about 20 patents, and finished college math and physics before graduating high school. So I know a little bit about this stuff, even if I’m mad and lost in the forest ☺.
At the end of the day, the proof is in the pudding, and your call for user testing is well placed. You mention that you haven’t used ARPA much, so I would suggest trying out any of the Furuno 4kw dome radars for a comparison. I pick them because they are not high end commercial devices, and compete directly with the Simrad/Navico devices. I have personal experience with the NavNet3D, TZTouch, and stand-alone 1835 radars’ ARPA, and performance is night and day compared to Simrad/Navico’s 4G and 10kw open array, both of which I have owned and operated as well. All these radars are geared towards varying levels of recreational boating and compete head to head. I can’t speak to Raymarine or Garmin since I haven’t used either of their radars with ARPA.
The beam width and pulse length arguments are red herrings. If they were real issues, then Furuno’s 4kw dome radars’ ARPA (4 deg beam) would perform about the same as the 4G (5 deg beam), and would perform worse than the Simrad 10kw open array (1.2 deg beam). But they don’t. And if a narrow beam and lots of power is the key to good ARPA calculations, then the Simrad 10kw, 6’ open array should perform much better with ARPA than the Simrad 4G. But it doesn’t. ARPA performs the same on both. For those brave among us, later on I’ll explain more about why they don’t matter.
As a little aside, I’ll just say ARPA to simplify things. The only difference between ARPA and MARPA is whether the radar can acquire targets automatically as opposed to you clicking on the target to acquire. Once acquired, there is no difference.
There are two simple tests to see how well your radar’s ARPA works.
1) Identify a target with AIS so it’s already displaying a course/speed vector. Now acquire it with ARPA. Once the target is fully acquired (takes a couple of minutes), compare the AIS and ARPA vectors. They should be very close and should track each other closely. Yes, if you are tracking a class B AIS target there will be some lag, but it’s clearly visible as the AIS target lags behind, then jumps to catch up. So just pick a Class A target for your experiments.
2) Pick a non-AIS target and acquire it with ARPA 2, 3 or 4 times (multiple locks on the same target at the same time). Compare the vectors. They should be very close to each other. Ironically, it was Navico’s radar engineering team that suggested this test to me, and it is what eventually led to them agreeing that there was a problem and to the return and refund of my equipment purchase.
I certainly agree that many boaters don’t care about ARPA, and even fewer have any real experience with it. As a result most people don’t know what to expect, so accept whatever they get. But after you have used ARPA that works well (meets or comes close to the IMO performance standards), you will know what to expect.
A few other things are worth noting about pulse length and beam width as they relate to ARPA performance. There are key misunderstandings in both your arguments.
- The pulse length determines range resolution, not accuracy. Range accuracy is what matters for ARPA, and is determined by how accurately the radar can time from the start of the pulse to the first echo return. That first echo return is the leading edge of the target and is extremely accurate. Looking at the Furuno NN3D/TZ 4kw dome radar and the 1835 dome radar, the range accuracy is 20m-25m, and is independent of pulse length. Range resolution or discrimination is the ability of the radar to tell whether there is a single target vs two targets closely spaced one behind the other on the same bearing. There has to be a gap between when the pulse passes over one target and before it passes over the next to tell that there are two targets. Otherwise they look like a single target. Regardless, the range is always to the leading edge of whatever is out there, and it is extremely accurate. That’s what matters for ARPA.
- Beam width determines bearing resolution, not bearing accuracy. Bearing accuracy is what matters for ARPA. This is very similar to pulse length, except it’s the side-to side resolution of targets rather than the distance resolution. The wider the beam, the less you can distinguish two targets that are at the same range, yet next to each other. With too wide a beam, it will still be sweeping across one target when it starts to sweep across the adjacent target, making it impossible to tell the difference between the two. The beam needs to be narrow enough to sweep completely past one target before encountering the next target to tell them apart. But what matters for ARPA is heading accuracy, not resolution. It doesn’t matter whether the radar detects one big target or two small ones that look like one big target. What matters is how accurately it can locate the echo blob regardless of its shape and size. Heck, when you plot targets manually (the same way that ARPA plots them), you mark the locations with a grease pencil and the results are still really accurate. Now, going back to the specs on the two previously mentioned Furuno radars, the heading accuracy is 1 deg, and it is independent of whether it’s a 4kw dome with a 4 deg beam width, or a 25kw open array with a 1.4 deg width.
The bottom line is that pulse length and beam width have very little effect on ARPA, and this bears out in actual product use. In practice see very little ARPA performance difference between a $2000 recreational NavNet 4kw dome, a $5000 workboat 1835 4kw dome, and a $25,000 commercial IMO FAR2xx7 12kw open array.
We already talked about AIS time lag for Class B targets. That’s to be expected and is easily anticipated. The other consideration brought up in the article is the time to acquire an accurate target. All the ARPA implementations I’ve used more or less follow the IMO guidelines that use one icon (typically a partial box) while the target is being acquired, then a different icon (typically a circle) once the target has been acquired. As mentioned in the article, the radar needs to plot a succession of echo marks to do the ARPA calculations, but it’s very clear when it’s “thinking” and when it’s acquired the target.
Oh, and ARPA calculations actually aren’t that hard. It’s basic vector math, exactly like applying set and drift to your heading and speed to figure out your COG/SOG.