
Mast rotation, a multi-manufacturer solution?
... written for Panbo by Ben Ellison and posted on Feb 3, 2011

Panbo reader Laurence Woodward built his own 40' catamaran in Devon, England, and he'd like to use Garmin GMI 10 color N2K instrument displays at both helms. However, his mast rotates and therefore he needs some sort of sensor to keep track of that rotation, which must then be applied to the apparent wind data coming from his masthead vane (or ultrasonic). I doubt that Garmin will develop its own rotation sensor because there aren't that many rotating masts out there, but then again maybe just a software tweak to their existing rudder angle adaptor might be all it takes. Or perhaps there's another way? Let's discuss...
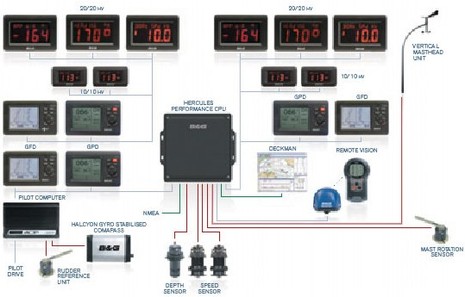
There seem to be two ways to measure mast rotation. One is to mount an electronic compass on the mast and compare its output to the vessel's regular fixed compass. That's what the elegant TackTick T221 seen at the top does when integrated with the company's wind and compass sensors (and note that it's all done wirelessly). Nexus seems to use the same technique with its MRC Box (though it's wired). But B&G appears to be using what looks much more like a rudder angle indicator, as seen in the suggested multihull setup seen below. It strikes me that it might be a little tricky to securely mount a mechanical sensor like that at the base of a rotating mast, but if it can be done on B&G-style grand prix ocean racers, I guess it can be done on a cruising cat. Besides, NKE claims that its mechanical rotation sensor -- could it really cost over $1,600? -- has withstood the rigors of Open 60s and Mini Transats.However, I think all these systems are pretty much closed networks and can't realistically help Laurence get wind screens on his GMI 10s. Oh, they probably can output AWA (apparent wind angle) via NMEA 0183 -- which the GMI 10 would understand -- but I'm pretty sure he'd need a single manuacturer's rotation sensor, wind sensor, cpu, and maybe its compass, just to calculate that corrected AWA. Plus he'd need at least one of the same manufacturer's displays to do the setup and calibration. This is not just a matter of proprietary mind sets; I don't believe there's any provision for a mast rotation correction in NMEA 0183, or even in NMEA 2000. While most every wind sensor system let's you put in an offset if you fail to mount the sensor exactly aligned to the bow, that's a typically proprietary calibration value and not a standard dynamic data field.
All that said, how hard would it be get a smart display like the GMI 10 to understand that sometimes it will be told that a certain rudder angle value is actually mast angle which needs to be added or subtracted from raw AWA to get real AWA? And couldn't N2K "instances" be used so that the real AWA -- and a real rudder angle, if present -- are what get's seen by other devices on the network? And shouldn't a system with an Airmar WeatherStation wind/heading sensor on the masthead and another compass below be able to cope with mast rotation? Couldn't Maretron offer a choice of compass or angular rotation corrections. And, finally, couldn't the NMEA write a new angular value PGN that -- like the fluid level PGN with its various fluid types -- included a list like rudder, mast, trim tab, etc.??
Admittedly I'm just riffing here, and it's quite possible none of those things will happen. But isn't it interesting how important one little data point can be? A significant portion of the electronics on Laurence Woodward's catamaran may be predicated on a simple angle measurement. And while I'm asking questions, how come none of the dedicated sailing instrument companies that do offer mast rotation correction have adopted NMEA 2000 or all-in-one color displays like the GMI 10?
{kind=link}
You could have a black box that has two can i/fs, i/f #1 takes in the PGN for the angle and the wind, computes the corrected AWA and "regenerates" the correct PGN and sends it out on can bus i.f #2, hence the GM10 doesnt know anything better.
Dave