
NavNet 3D, moving toward the nitty gritty
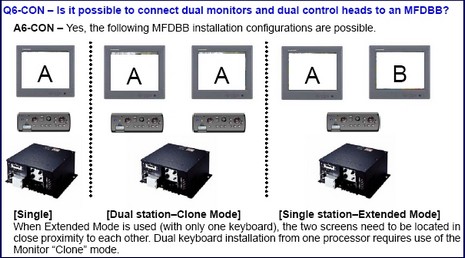
I don’t know when NavNet 3D will actually ship, but the nitty gritty details are emerging. There’s a very useful NavNet 3D FAQ (PDF) up at Furuno’s “Learning Center” (lower right, under Reference Materials). I’ve only skimmed it but was pleased to read how nicely NN3D handles multiple N2K GPS, depth, and other sensors (you pick a preferred sensor and the whole system will honor that preference unless it fails, when a backup will automatically be used). There’s also a good explanation (above) of the blackbox version’s support for multiple monitors, a great feature that’s hardly been mentioned yet by mutts like me. Fortunately, too, a Panbo reader with a strong personal interest in NN3D sent me notes on the FAQ—some enthusiastic, some skeptical, and some perhaps based on misunderstandings. Check it all out and add your own two cents:
- Furuno is really embracing open standards, dumping their proprietary stuff (e.g., AD10 and Furuno ethernet connectors).
- NN3D cannot co-exist on the same network as NavNet 1/2. This is a disruptive change, it's either go to the new stuff or stay with the old, no blending.
- The system is Ethernet based (with standard RJ45 connectors) and the MFDs act as gateways for NMEA 183 and 2000. Note that only one MFD or DRS {digital radar scanner} can be connected to the N2K network!
- They’re hedging on the performance of the MFDs. The 8” and 12” MFDs apparently have slower processors with less memory than the BB; no surprise looking at the price difference. I suspect the "PC" inside the MFDs is fairly old and a victim of the long development cycle and desired price point. For what they provide they are actually pretty low cost when compared with a laptop. V2 of the MFDs will probably have a pretty significant performance boost, courtesy of Intel and Samsung.
- A wireless mouse will presumably require a USB dongle, so what's the issue with a Bluetooth mouse (maybe no standard drivers in XP)?
- Power synchronization almost looks mandatory with "off" units really just in "sleep". This system may be much more power hungry than I had hoped (obviously not an issue on a fishing boat!). And synchronization may cause real problems since a defect in one unit (corrupt route file) may get propagated when you would prefer not.
- How come only one heading sensor allowed, while others get automatic fail over? But nice that ARPA is now included.
- Also disturbing are Chart answers A5–A7 (pg 12). It won’t be possible to buy or update charts online for regions outside the US. There are a lot more internet connections in the 3rd world than there are Furuno chart dealers.
The FAQ is great, but here are a few additional things that I'd like to know:
1) Does the MFD8 connect to the PSU012 to control power to the DRS4A?
2) What are the power requirements of the Hub101?
3) To avoid a single point of failure in the system a NMEA2000 drop will need to be run to each MFD. Since only one MFD or DRS may be connected to the network at a time, must the cable be left adjacent but disconnected? Or is there a way to logically disable the NMEA 2000 port?